Элементарные преобразования строк блочной матрицы. Приведение матрицы к ступенчатому виду. Элементарные преобразования строк и столбцов. Эквивалентность слау при элементарных преобразованиях
К элементарным преобразованиям матрицы относятся:
1. Изменение порядка строк (столбцов).
2. Отбрасывание нулевых строк (столбцов).
3. Умножение элементов любой строки (столбца) на одно число.
4. Прибавление к элементам любой строки (столбца) элементов другой строки (столбца), умноженных на одно число.
Системы линейных алгебраических уравнений слу (Основные понятия и определения).
1. Системой m линейных уравнений с n неизвестными называется система уравнений вида:
2. Решением системы уравнений (1) называется совокупность чисел x 1 , x 2 , … , x n , обращающая каждое уравнение системы в тождество.
3. Система уравнений (1) называется совместной , если она имеет хотя бы одно решение; если система не имеет решений, она называется несовместной .
4. Система уравнений (1) называется определенной , если она имеет только одно решение, и неопределенной , если у нее более одного решения.
5. В результате элементарных преобразований система (1) преобразуется к равносильной ей системе (т.е. имеющей то же множество решений).
К элементарным преобразованиям систем линейных уравнений относятся:
1. Отбрасывание нулевых строк.
2. Изменение порядка строк.
3. Прибавление к элементам любой строки элементов другой строки, умноженных на одно число.
Методы решения систем линейных уравнений.
1) Метод обратной матрицы (матричный метод) решения систем n линейных уравнений с n неизвестными.
Системой n линейных уравнений с n неизвестными называется система уравнений вида:

Запишем систему (2) в матричном виде, для этого введем обозначения.
Матрица коэффициентов перед переменными:

X = ‒ матрица переменных.
В = ‒ матрица свободных членов.
Тогда система (2) примет вид:
A ×X = B ‒ матричное уравнение.
Решив уравнение, получим:
X = A -1 ×B
Пример:

 ;
;
;
;
1) │А│= 15 + 8 ‒18 ‒9 ‒12 + 20 = 4 0 матрицаА -1 существует.
3)
![]()
![]()
![]()
![]()
![]()
![]()
Ã
=

4)
А -1
=
× Ã = ;
;
Х
= А -1
×
B
Ответ:
2) Правило Крамера решения систем n – линейных уравнений с n – неизвестными.
Рассмотрим систему 2 ‒ х линейных уравнений с 2 ‒ мя неизвестными:

Решим эту систему методом подстановки:
Из первого уравнения следует:
![]()
Подставив во второе уравнение, получим:
![]()
![]()

Подставляем значение в формулу для, получим:

Определитель Δ - определитель матрицы системы;
Δ x 1 - определитель переменной x 1 ;
Δ x 2 - определитель переменной x 2 ;
Формулы:
x 1 =;x 2 =;…,x n = ;Δ 0;
‒ называются формулами Крамера.
При нахождении определителей неизвестных х 1 , х 2 ,…, х n заменяется столбец коэффициентов при той переменной, определитель которой находят, на столбец свободных членов.
Пример: Решить систему уравнений методом Крамера

Решение:
Составим и вычислим сначала главный определитель этой системы:
Так как Δ ≠ 0, то система имеет единственное решение, которое можно найти по правилу Крамера:

где Δ 1 , Δ 2 , Δ 3 получаются из определителя Δ путем замены 1‒ го, 2 ‒ го или 3 ‒ го столбца, соответственно, на столбец свободных членов.
Таким образом:
Метод Гаусса решения систем линейных уравнений.
Рассмотрим систему:

Расширенной матрицей системы (1) называется матрица вида:

Метод Гаусса – это метод последовательного исключения неизвестных из уравнений системы, начиная со второго уравнения по m – тое уравнение.
При этом путем элементарных преобразований матрица системы приводится к треугольной (если m = n и определитель системы ≠ 0) или ступенчатой (если m < n ) форме.
Затем, начиная с последнего по номеру уравнения, находятся все неизвестные.
Алгоритм метода Гаусса:
1) Составить расширенную матрицу системы, включающую столбец свободных членов.
2) Если а 11 0, то первую строку делим на а 11 и умножаем на (– a 21) и прибавляем вторую строку. Аналогично дойти до m –той строки:
I стр. делим на а 11 и умножаем на (– а m 1) и прибавляем m – тую стр.
При этом из уравнений, начиная со второго по m – тое, исключится переменная x 1 .
3) На 3 ‒ м шаге вторая строка используется для аналогичных элементарных преобразований строк с 3 ‒ й по m – тую. При этом исключится переменная x 2 , начиная с 3 ‒ й строки по m – тую, и т. д.
В результате этих преобразований система приведется к треугольной или ступенчатой форме (в случае треугольной формы под главной диагональю нули).
Приведение системы к треугольной или ступенчатой форме называется прямым ходом метода Гаусса , а нахождение неизвестных из полученной системы называется обратным ходом .
Пример:

Прямой ход. Приведём расширенную матрицу системы

с помощью элементарных преобразований к ступенчатому виду. Переставим первую и вторую строки матрицыA b , получим матрицу:

Сложим вторую строку полученной матрицы с первой, умноженной на (‒2), а её третью строку – с первой строкой, умноженной на (‒7). Получим матрицу

К третьей строке полученной матрицы прибавим вторую строку, умноженную на (‒3), в результате чего получим ступенчатую матрицу

Таким образом, мы привели данную систему уравнений к ступенчатому виду:
 ,
,
Обратный ход. Начиная с последнего уравнения полученной ступенчатой системы уравнений, последовательно найдём значения неизвестных:
Матрица преобразований применяется для вычисления новых координат объекта при его трансформации. Изменяя значения элементов матрицы преобразования, к объектам можно применять любые трансформации (например: масштабирование, зеркальное отражение, поворот, перемещение и т. п.). При любой трансформации сохраняется параллельность линий объекта.
Координаты в PDF выражаются в терминах двумерного пространства. Точка (x, y) в пространстве может быть выражена в векторной форме . Постоянный третий элемент этого вектора (1) нужен для использования вектора с матрицами 3х3 в вычислениях, описанных ниже.
Преобразование между двумя системами координат представлено, как матрица 3х3 и записывается следующим образом:
Координатные преобразования выражаются в виде матричных умножений:
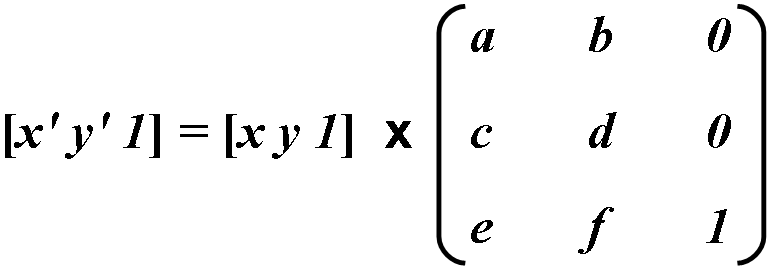
Так как последняя колонка не оказывает ни какого влияния на результаты расчета, то она в вычислениях не принимает участия. Координаты трансформации высчитываются по следующим формулам:

Единичная матрица
Единичной матрицей называется, та у которой значения матрицы a и d равны 1 , а остальные равны 0 . Такая матрица применяется по умолчанию, так как не приводит к трансформации. Поэтому единичную матрицу используют как основу.

Масштабирование
Для увеличения или уменьшения размера объекта по горизонтали/вертикали следует изменить значение a или d соответственно, а остальные применить из единичной матрицы.
Например: Для увеличения размера объекта в два раза по горизонтали, значение a необходимо принять равным 2, а остальные оставить такими как в единичной матрице.



Отражение
Чтобы получить зеркальное отображение объекта по горизонтали следует установить значение a = -1 , по вертикали d = -1 . Изменение обеих значений применяется для одновременного отображения по горизонтали и вертикали.


Наклон
Наклон объекта по вертикали/горизонтали обеспечивается изменением значений b и c соответственно. Изменение значения b/-b - наклон вверх/вниз, c/-c – вправо/влево.
Например: Для наклона объекта по вертикали вверх установим значение b = 1

Высчитываем новые координаты объекта:


В итоге к наклону объекта приводит только координата y , которая увеличивается на значение x .
Поворот
Поворот — это комбинация масштабирования и наклона, но для сохранения начальных пропорций объекта, преобразования должны проводится с точными вычислениями при использовании синусов и косинусов.

Сам поворот происходит против часовой стрелки, α задаёт угол поворота в градусах.
Перемещение
Перемещение осуществляется изменением значений e (по горизонтали) и f (по вертикали). Значения задаются в пикселях.
Например: Перемещение с использованием матрицы применяется редко из-за того, что эту операцию можно проделать другими методами, например, изменить положение объекта во вкладке .
Поскольку матрица трансформации имеет только шесть элементов, которые могут быть изменены, визуально она отображается в PDF . Такая матрица может представлять любое линейное преобразование из одной координатной системы в другую. Матрицы преобразований образуются следующим образом:
- Перемещения указываются как , где t x и t y — расстояния от оси системы координат по горизонтали и вертикали, соответственно.
- Масштабирование указывается как . Это масштабирует координаты так, что 1 единица в горизонтальном и вертикальном измерениях в новой координатной системе такого же размера, как и s x и s y единиц в старой координатной системе соответственно.
- Повороты производятся матрицей , что соответствует повороту осей координатной системы на θ градусов против часовой стрелки.
- Наклон указывается как , что соответствует наклону оси x на угол α и оси y на угол β .
На рисунке ниже показаны примеры трансформации. Направления перемещения, угол поворота и наклона, показанные на рисунке, соответствуют положительным значениям элементов матрицы.

Умножения матрицы не коммутативны — порядок, в котором перемножаются матрицы, имеет значение.
В таблице ниже приведены допустимые преобразования и значения матрицы.
| Исходный рисунок | Трансформированный рисунок | Матрица | Описание |
|---|---|---|---|
 |
 |
1 0
0 2 0 0 |
Масштаб по вертикали. Если значение матрицы больше 1, объект расширяется, меньше 1 — сжимается. |
|
 |
2 0
0 1 0 0 |
Масштаб по горизонтали. Если значение матрицы больше 1, объект расширяется, меньше 1 — сжимается. |
|
 |
-1 0
0 1 0 0 |
Отражение по горизонтали. |
|
 |
1 0
0 -1 0 0 |
Отражение по вертикали. |
|
 |
1 1
0 1 0 0 |
Наклон по вертикали вверх. |
|
 |
1 -1
0 1 0 0 |
Наклон по вертикали вниз. |
|
 |
1 0
1 1 0 0 |
Наклон по горизонтали вправо. |
|
 |
1 0
-1 1 0 0 |
Элементарными преобразованиями называют следующие действия над строками и столбцами матрицы A:
1) перестановку местами двух строк или столбцов матрицы;
2) умножение строки или столбца матрицы на число, отличное от нуля;
3) прибавление к одной строке (столбцу) другой строки (столбца).
Теорема. Элементарные преобразования не меняют ранг матрицы, то есть, если матрица B получена из матрицы A элементарными преобразованиями, то.
Доказательство. 1). При перестановке местами двух столбцов матрицы максимальное число линейно независимых столбцов не меняется, а значит, не меняется и её ранг.
2). Пусть матрица Bполучена из матрицыAумножениемi- ой строки на числоt0 иr(A) =k. Очевидно, любой минор матрицыB, не содержащийi- тую строку, равен соответствующему минору матрицыA, а любой минор матрицыB, содержащийi-тую строку, равен соответствующему минору матрицыAумноженному на числоt. Следовательно, минор порядкаkматрицыB, соответствующий базисному минору матрицыA, будет отличен от нуля, а все миноры порядкаk+1 матрицыB, как и все миноры порядкаk+1 матрицыA, будут равны нулю. А это значит, чтоr(B)=k=r(A).
3). Пусть матрица Bполучена из матрицыAприбавлениемi- ой строки кj-той строке иr(A) =k. Миноры порядкаk+1 матрицыB, не содержащиеj-тую строку, будут равны соответствующим минорам матрицыA, и поэтому равны нулю. Миноры порядкаk+1 матрицыB, содержащиеi- тую иj-тую строки, будут равны сумме двух нулевых определителей. Один из этих определителей содержит две одинаковых строки (вj-той строке расположены элементыi–той строки), а второй определитель является минором порядкаk+1 матрицыAи поэтому равен нулю. Миноры порядкаk+1 матрицыB, содержащиеj-тую строку, но не содержащиеi-тую строку, будут равны сумме двух миноров порядкаk+1 матрицыAи поэтому тоже будут равны нулю. Следовательно, все миноры порядкаk+1 матрицыBравны 0 иr(B)k=r(A).
Пусть матрица Cполучена из матрицыBумножениемi–той строки на (-1). Тогда матрицаAполучается из матрицыCприбавлениемi–той строки кj-той строке и умножениемi–той строки на (-1). Следовательно, как было доказано выше, будетr(A)r(C) =r(B). Таким образом, одновременно справедливы неравенстваr(B)r(A) иr(A)r(B) откуда следует, чтоr(A) =r(B).
Это свойство элементарных преобразований используют на практике для вычисления ранга матрицы. Для этого, при помощи элементарных преобразований, приводят данную (ненулевую) матрицу A к трапецевидной форме, то есть к виду
B
=
 ,
,
где элементы для всех i = 1,2,...,k; элементыдля всех i > j и
i > k. Очевидно, что r(B) = k, то есть ранг матрицы Bравен числу ненулевых строк. Это следует из того, что минор порядка k матрицыB, расположенный на пересечении первых k строк и столбцов, является определителем диагонального вида и равен; а любой минор порядка k+1 матрицы В содержит нулевую строку, а значит, равен 0 (либо, если k = n, таких миноров нет вообще).
Теорема. Любую ненулевую матрицуAразмерностиmnможно привести к трапецевидной форме при помощи элементарных преобразований.
Доказательство.
Так какA0, то существует элемент матрицы .
Переставив местами первую иi-тую
строки, первый иj-тый
столбцы, переместим элемент
.
Переставив местами первую иi-тую
строки, первый иj-тый
столбцы, переместим элемент в
левый верхний угол матрицы и обозначим
в
левый верхний угол матрицы и обозначим .
Затем кi-той строке
полученной матрицы (i=
2,3, …,m) прибавим первую
строку, умноженную на число
.
Затем кi-той строке
полученной матрицы (i=
2,3, …,m) прибавим первую
строку, умноженную на число .
В результате этих элементарных
преобразований получим матрицу
.
В результате этих элементарных
преобразований получим матрицу
A .
.
Если
все элементы
 матрицыAравны нулю, то теорема доказана. Если
же существует элемент
матрицыAравны нулю, то теорема доказана. Если
же существует элемент ,
то, перестановкой второй иi-той
строк, второго иj-того
столбцов матрицыA,
переместим элемент
,
то, перестановкой второй иi-той
строк, второго иj-того
столбцов матрицыA,
переместим элемент на место элемента
на место элемента и обозначим
и обозначим (если
(если ,
тогда сразу обозначим
,
тогда сразу обозначим ).
Затем кi-той строке
полученной матрицы (i= 3,
…,m) прибавим вторую
строку, умноженную на число
).
Затем кi-той строке
полученной матрицы (i= 3,
…,m) прибавим вторую
строку, умноженную на число .
В результате получим матрицу
.
В результате получим матрицу

 .
.
Продолжив этот процесс, за конечное число шагов получим матрицу B, то есть приведем матрицуAк трапецевидной форме.
Пример. Вычислим ранг матрицы





 .
Стрелками обозначены следующие
элементарные преобразования: 1) переставили
местами первую и вторую строки; 2)
прибавили к четвертой строке третью;
3) прибавили к третьей строке первую,
умноженную на -2, и четвертую строку
поделили на 3; 4) поделили третью строку
на 5 и переставили местами третью и
четвертую строки; 5) к третьей строке,
умноженной на -3, прибавили вторую строку
и к четвертой строке прибавили третью.
Видно, что матрица, полученная из матрицы
А указанными элементарными преобразованиями,
имеет трапецевидную форму с тремя
ненулевыми строками. Следовательно,
r(A) = 3.
.
Стрелками обозначены следующие
элементарные преобразования: 1) переставили
местами первую и вторую строки; 2)
прибавили к четвертой строке третью;
3) прибавили к третьей строке первую,
умноженную на -2, и четвертую строку
поделили на 3; 4) поделили третью строку
на 5 и переставили местами третью и
четвертую строки; 5) к третьей строке,
умноженной на -3, прибавили вторую строку
и к четвертой строке прибавили третью.
Видно, что матрица, полученная из матрицы
А указанными элементарными преобразованиями,
имеет трапецевидную форму с тремя
ненулевыми строками. Следовательно,
r(A) = 3.
Определение 5.8. Элементарными преобразованиями строк матрицы называют следующие преобразования:
1) умножение строки матрицы на ненулевое действительное число;
2) прибавление к одной строке матрицы другой её строки, умноженной на произвольное действительное число.
Лемма 5.1. С помощью элементарных преобразований строк матрицы можно поменять местами любые две строки.
Доказательство.
А=  .
. 

 .
.
Ступенчатая матрица. Ранг матрицы
Определение 5.9. Ступенчатой будем называть матрицу, которая обладает следующими свойствами:
1) если i -я строка нулевая, то (i + 1)-я строка также нулевая,
2) если первые ненулевые элементы i -й и (i + 1)-й строк расположены в столбцах с номерами k и R , соответственно, то k < R .
Условие 2) требует обязательного увеличения нулей слева при переходе от i -й строки к (i + 1)-й строке. Например, матрицы
А
1 =  , А
2 =
, А
2 =  , А
3 =
, А
3 =
являются ступенчатыми, а матрицы
В
1 =  , В
2 =
, В
2 =  , В
3 =
, В
3 = 
ступенчатыми не являются.
Теорема 5.1. Любую матрицу можно привести к ступенчатой с помощью элементарных преобразований строк.
Проиллюстрируем эту теорему на примере.
А
= 




 .
.
Получившаяся матрица – ступенчатая.
Определение 5.10. Рангом матрицы будем называть число ненулевых строк в ступенчатом виде этой матрицы.
Например, ранг матрицы А в предыдущем примере равен 3.
Вопросы для самоконтроля
1. Что называется матрицей?
2. Как производится сложение и вычитание матриц; умножение матрицы на число?
3. Дайте определение умножению матриц.
4. Какая матрица называется транспонированной?
5. Какие преобразования строк матрицы называются элементарными?
6. Дайте определение ступенчатой матрицы.
7. Что называют рангом матрицы?
Определители
Вычисление определителей
Определители второго порядка
Рассмотрим квадратную матрицу второго порядка
Определение 6.1. Определителем второго порядка, соответствующим матрице A,называется число, вычисляемое по формуле
│А │= = .
Элементы a ij называются элементами определителя │A │, элементы а 11 , а 22 образуют главную диагональ , а элементы а 12 , а 21 – побочную.
Пример. = –28 + 6 = –22.
Определители третьего порядка
Рассмотрим квадратную матрицу третьего порядка
А
=  .
.
Определение 6.2. Определителем третьего порядка, соответствующим матрице А , называется число, вычисляемое по формуле
│А │= = .
Чтобы запомнить, какие произведения в правой части равенства следует брать со знаком «плюс», а какие ─ со знаком «минус», полезно запомнить правило, называемое правилом треугольника:

Пример.
1)  = –4 + 0 + 4 – 0 + 2 + 6 = 8.
= –4 + 0 + 4 – 0 + 2 + 6 = 8.
2) = 1, т. е. │Е 3 │= 1.
Рассмотрим ещё один способ вычисления определителя третьего порядка.
Определение 6.3. Минором M ij элемента a ij определителя называется определитель, полученный из данного вычёркиванием i -й строки и j -го столбца. Алгебраическим дополнением A ij элемента a ij определителя называется его минор M ij , взятый со знаком (–1) i + j .
Пример. Вычислим минор М 23 и алгебраическое дополнение А 23 элемента а 23 в матрице
Вычислим минор М 23:
М
23 =  = = –6 + 4 = –2.
= = –6 + 4 = –2.
Тогда А 23 = (–1) 2+3 М 23 = 2.
Теорема 6.1. Определитель третьего порядка равен сумме произведений элементов какой-либо строки (столбца) на их алгебраические дополнения.
Доказательство. По определению
 = . (6.1)
= . (6.1)
Выберем, например, вторую строку и найдём алгебраически дополнения А 21 , А 22 , А 23:
А
21 = (–1) 2+1 = –(![]() ) =
) = ![]() ,
,
А
22 = (–1) 2+2 = ![]() ,
,
А
23 = (–1) 2+3 = –(![]() ) =
) = ![]() .
.
Преобразуем теперь формулу (6.1)
│А
│= (![]() ) + (
) + (![]() ) + (
) + (![]() ) =
) =
= А 21 + А 22 + А 23.
Формула А │= А 21 + А 22 + А 23 . называется разложением определителя │А │ по элементам второй строки. Аналогично разложение можно получить по элементам других строк и любого столбца
Пример.
= (по элементам второго столбца) = 1× (–1) 1+2 + 2 × (–1) 2+2 +
+ (–1)(–1) 3+2 = –(0 + 15) + 2(–2 +20) + (–6 +0) = –15 +36 – 6 = 15.
6.1.3 Определители n-го порядка (n N )
Определение 6.4. Определителем n -го порядка, соответствующим матрице n -го порядка
А = 
называется число, равное сумме произведений элементов какой-либо строки (столбца) на их алгебраические дополнения, т. е.
│A │= А i1 + A i2 + … + A in = А 1j + A 2j + … + A nj .
Нетрудно заметить, что при n = 2 получается формула для вычисления определителя второго порядка. Если n = 1, то по определению будем считать |A | = |a | = a .
Пример.
 = (по элементам 4-й строки) = 3×(–1) 4+2 +
= (по элементам 4-й строки) = 3×(–1) 4+2 +
2×(–1) 4+4 = 3(–6 + 20 –2 –32) +2(– 6 +16 +60 +2) = 3(–20) +2×72 = –60 +144 = 84.
Заметим, что если в определителе все элементы какой-либо строки (столбца), кроме одного, равны нулю, то при вычислении определителя его удобно разложить по элементам этой строки (столбца).
Пример.
│Е n │= = 1 × │E n - 1 │ = … = │E 3 │= 1.
Свойство определителей
Определение 6.5. Матрицу вида
 или
или 
будем называть треугольной матрицей.
Свойство 6.1. Определитель треугольной матрицы равен произведению элементов главной диагонали, т. е.
 =
=  =
= ![]() .
.
Свойство 6.2. Определитель матрицы с нулевой строкой или нулевым столбцом равен нулю.
Свойство 6.3. При транспонировании матрицы определитель не изменяется, т. е.
│А │= │А t │.
Свойство 6.4. Если матрица В получается из матрицы А умножением каждого элемента некоторой строки на число k , то
│В │= k │А │.
Свойство 6.5.
 =
=  +
+  .
.
Свойство 6.6. Если матрица В получается из матрицы А перестановкой двух строк, то│В │= −│А │.
Свойство 6.7. Определитель матрицы с пропорциональными строками равен нулю, в частности, нулю равен определитель матрицы с двумя одинаковыми строками.
Свойство 6.8. Определитель матрицы не изменяется, если к элементам одной строки прибавить элементы другой строки матрицы, умноженные на некоторое число.
Замечание. 6.1. Так, как по свойству 6.3 определитель матрицы не меняется при транспонировании, то все свойства о строках матрицы верны и для столбцов.
Свойство 6.9. Если А и В – квадратные матрицы порядка n , то │АВ │=│А ││В │.
Обратная матрица
Определение 6.6. Квадратная матрица А порядка n называется обратимой, если существует матрица В такая, что АВ = ВА = Е n . В этом случае матрица В называется обратной к матрице А и обозначается А –1 .
Теорема 6.2. Справедливы следующие утверждения:
1) если матрица А обратима, то существует точно одна ей обратная матрица;
2) обратимая матрица имеет определитель, отличный от нуля;
3) если А и В – обратимые матрицы порядка n , то матрица АВ обратима, причём (АВ ) –1 = В –1 ×А –1 .
Доказательство.
1. Пусть В и С – матрицы, обратные к матрице А , т. е. АВ = ВА = Е n и АС = СА = Е n . Тогда В = ВЕ n = В (АС ) = (ВА )С = Е n С = С .
2. Пусть матрица А обратима. Тогда существует матрица А –1 , ей обратная, причём
АА –1 = Е n .
По свойству 6.9 определителя │АА –1 │=│А ││А –1 │. Тогда │А ││А –1 │=│Е n │, откуда │А ││А –1 │= 1. Следовательно, │А │¹ 0.
3. Действительно,
(АВ )(В –1 А –1) = (А (ВВ –1))А –1 = (АЕ n )А –1 = АА –1 = Е n .
(В –1 А –1)(АВ ) = (В –1 (А –1 А 21 = –1, А 22 = 2. Тогда А –1 = .
Вопросы для самоконтроля
1. Что называется определителем?
2. Каковы его основные свойства?
3. Что называется минором и алгебраическим дополнением?
4. Каковы способы вычисления определителей (второго, третьего и n -го порядков)?
5. Какая матрица называется квадратной?
Похожая информация.
Матричная алгебра - Элементарные преобразования матриц
Элементарные преобразования матриц
Элементарные преобразования матрицы находят широкое применение в различных математических задачах. Например, они составляют основу известного метода Гаусса (метода исключения неизвестных) для решения системы линейных уравнений .
К элементарным преобразованиям относятся:
1) перестановка двух строк (столбцов);
2) умножение всех элементов строки (столбца) матрицы на некоторое число, не равное нулю;
3) сложение двух строк (столбцов) матрицы, умноженных на одно и то же число, отличное от нуля.
Две матрицы называются эквивалентными , если одна из них может быть получена из другой после конечного числа элементарных преобразований. В общем случае эквивалентные матрицы равными не являются, но имеют один и тот же ранг.
Вычисление определителей с помощью элементарных преобразований
С помощью элементарных преобразований легко вычислить определитель матрицы. Например, требуется вычислить определитель матрицы:
где ≠ 0.
Тогда можно вынести множитель :

теперь, вычитая из элементов j - го столбцасоответствующие элементы первого столбца, умноженные на, получим определитель:

который равен: где


Затем повторяем те же действия для и, если все элементы ![]() то тогда окончательно получим:
то тогда окончательно получим:

Если для какого-нибудь промежуточного определителя окажется, что его левый верхний элемент , то необходимо переставить строки или столбцы втак, чтобы новый левый верхний элемент был не равен нулю. Если Δ ≠ 0, то это всегда можно сделать. При этом следует учитывать, что знак определителя меняется в зависимости от того, какой элемент является главным (то есть, когда матрица преобразована так, что). Тогда знак соответствующего определителя равен.
П р и м е р. С помощью элементарных преобразований привести матрицу